教授抱歉~因為之前作業十的部落格排版一直出問題,
所以延慢了幾天張貼作業十,但是現在問題已經解決了,
所以可否麻煩您再看完作業十一時,往下看一下我的作業十。
造成您的不便深感歉意!!謝謝!!
==========================================
蔡智鴻 B94611037
本人5/24曾來上課部落格
圖片皆在部落中http://kaohsiungman888.blogspot.com/
==========================================
1.某凸輪開始時先在0-100∘區間滯留,然後提升後在200至260∘區間滯留,其高度(衝程)為5公分,其餘l由260∘至360∘則為返程。升程採用等加速度運動,返程之運動型式自定。設刻度區間為10∘,試繪出其高度、速度及加速度與凸輪迴轉角度間之關係。
2.設凸輪之半徑為15公分,以順時針方向旋轉,其從動件為梢型,垂直接觸,長為10公分,從動件之運動係依照第二項之運動型式。
3.試繪出此凸輪之工作曲線。
你能讓此凸輪迴轉嗎?
============================================
1.
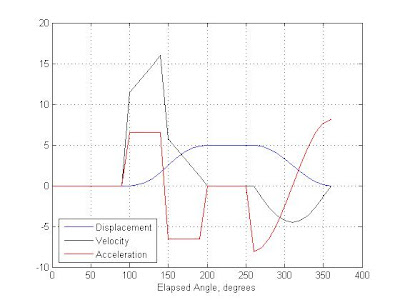
假設回程是等速度運動,
輸入指令plot_dwell(0:10:360,5,[2 1],[100 200 260])
%0:10:360 : 指的是圖輪的刻度區有360度而刻度區間是10度
%5 : 從動件衝程[2 1] : 是運動模示2是等加速度運動,1是等速度運動
%[100 200 260] : 指的是運動區間

除此之外我們還可以把各種狀況都考慮進去
返程等加速度運動(代號2)

返程是簡諧運動(代號3)


3.
使用第三題用到的pincam函式,在裡面多加入一旋轉迴圈,使此凸輪迴轉
本人5/24曾來上課部落格
圖片皆在部落中http://kaohsiungman888.blogspot.com/
==========================================
1.某凸輪開始時先在0-100∘區間滯留,然後提升後在200至260∘區間滯留,其高度(衝程)為5公分,其餘l由260∘至360∘則為返程。升程採用等加速度運動,返程之運動型式自定。設刻度區間為10∘,試繪出其高度、速度及加速度與凸輪迴轉角度間之關係。
2.設凸輪之半徑為15公分,以順時針方向旋轉,其從動件為梢型,垂直接觸,長為10公分,從動件之運動係依照第二項之運動型式。
3.試繪出此凸輪之工作曲線。
你能讓此凸輪迴轉嗎?
============================================
1.
假設回程是等速度運動,
輸入指令plot_dwell(0:10:360,5,[2 1],[100 200 260])
%0:10:360 : 指的是圖輪的刻度區有360度而刻度區間是10度
%5 : 從動件衝程[2 1] : 是運動模示2是等加速度運動,1是等速度運動
%[100 200 260] : 指的是運動區間

除此之外我們還可以把各種狀況都考慮進去
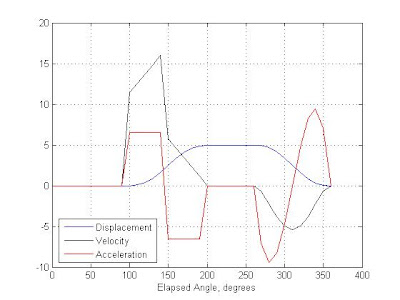
返程等加速度運動(代號2)

返程是簡諧運動(代號3)

返程是擺線運動(代號4)

返程是多項式運動(代號5)
2.
輸入指令[x y]=pincam([0:10:360],15,5,0,10,[100 200 260],[2 1],-1)
%0:10:360 : 指的是圖輪的刻度區有360度而刻度區間是10度
%15 : 凸輪基圓半徑
%5 : 從動件衝程
%0 : 偏置量
%10 : 從動件長度
%[100 200 260] : 指的是運動區間
%[2 1] : 是運動模示2是等加速度運動,1是等速度運動
%-1 : 順時鐘旋轉

2.
輸入指令[x y]=pincam([0:10:360],15,5,0,10,[100 200 260],[2 1],-1)
%0:10:360 : 指的是圖輪的刻度區有360度而刻度區間是10度
%15 : 凸輪基圓半徑
%5 : 從動件衝程
%0 : 偏置量
%10 : 從動件長度
%[100 200 260] : 指的是運動區間
%[2 1] : 是運動模示2是等加速度運動,1是等速度運動
%-1 : 順時鐘旋轉

3.
使用第三題用到的pincam函式,在裡面多加入一旋轉迴圈,使此凸輪迴轉
所以將老師的pincam改寫為pincamsper
function [x,y]=pincamsuper(cth,r0,s,e,L,range,pattern,cw)
figure(1);%先叫出空白圖
pause(2); %停兩秒,以利準備拍攝的程式
clf;
th=cth*pi/180;
s0=sqrt(r0*r0-e*e);
oo=37;
for nn=1:10:360 mm=nn*pi/180;
oo=oo-1;
clf;
axis([-30 30 -30 30])
for i=1:length(cth)t=th(i)*cw;A=[cos(t+mm) -sin(t+mm);sin(t+mm) cos(t+mm)];
clf;
axis([-30 30 -30 30])
for i=1:length(cth)t=th(i)*cw;A=[cos(t+mm) -sin(t+mm);sin(t+mm) cos(t+mm)];
[ym,yy,yyy]=dwell(cth(i),range,pattern);
x0=s0+ym*s;
x0=s0+ym*s;
Sx=[0 x0 x0+L;e e e];
X=A\Sx;x(i)=X(1,2);
y(i)=X(2,2);
end[yw,yww,ywww]=dwell(cth,range,pattern);
end[yw,yww,ywww]=dwell(cth,range,pattern);
y1=yw*s+r0+L;
y2=yw*s+r0 ;
line([0 0],[y1(oo),y2(oo)],'linewidth',10,'color','blue');
line([0 0],[y1(oo),y2(oo)],'linewidth',10,'color','blue');
line([0 30],[y1(oo),20],'linewidth',10,'color','red');
axis([-30 30 -30 30])
axis([-30 30 -30 30])
hold on;
plot([0 x],[0 y],'ro',x,y,'k-')
pause(0.02);
end
pause(0.02);
end
所以一樣代入函式就可以得到凸輪迴轉的動畫
[x y]=pincamsuper([0:10:360],15,5,0,10,[100 200 260],[2 1],-1)





















{kind=link}
{kind=link}