B94611037 蔡智鴻
部落格
http://kaohsiungman888.blogspot.com/圖片皆在部落格中
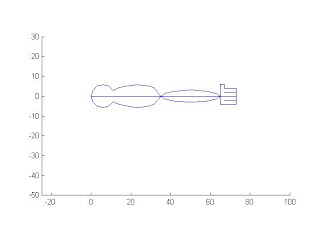
第一小題
L1=35;%這是上手臂長
L2=30;%這是手臂長
L3=8;%這是手掌長
r1=L1/6;%把手掌分段以利設座標
r2=L2/2;
r3=L3/2;
a1=[0 r1*cosd(150)+r1 r1*cosd(120)+r1 r1 r1*cosd(60)+r1 r1*cosd(30)+r1 2*r1*cosd(45)+r1 2*r1*cosd(60)+2*r1 4*r1 2*r1*cosd(60)+4*r1 2*r1*cosd(45)+4*r1 6*r1 2*r1*cosd(45)+4*r1 2*r1*cosd(60)+4*r1 4*r1 2*r1*cosd(60)+2*r1 2*r1*cosd(45)+r1 r1*cosd(30)+r1 r1*cosd(60)+r1 r1 r1*cosd(240)+r1 r1*cosd(210)+r1 0 L1];
b1=[0 r1*sind(150) r1*sind(120) r1 r1*sind(60) r1*sind(30) r1*sind(45) r1*sind(60) r1 r1*sind(60) r1*sind(45) 0 -r1*sind(45) -r1*sind(60) -r1 -r1*sind(60) -r1*sind(45) -r1*sind(30) -r1*sind(60) -r1 r1*sind(240) r1*sind(210) 0 0];
a2=[0 r2+r2*cosd(150) r2+r2*cosd(120) r2+r2*cosd(90) r2+r2*cosd(60) r2+r2*cosd(30) r2+r2*cosd(0) r2+r2*cosd(30) r2+r2*cosd(60) r2+r2*cosd(90) r2+r2*cosd(120) r2+r2*cosd(150) 0 2*r2];
b2=[0 r2/5*sind(150) r2/5*sind(120) r2/5*sind(90) r2/5*sind(60) r2/5*sind(30) r2/5*sind(0) -r2/5*sind(30) -r2/5*sind(60) -r2/5*sind(90) -r2/5*sind(120) -r2/5*sind(150) 0 0 ];
a3=[0 0 r3/2 r3/2 2*r3 2*r3 r3/2 2*r3 2*r3 r3/2 2*r3 2*r3 r3/2 2*r3 2*r3 0 0 2*r3];
b3=[0 r3*1.5 r3*1.5 r3 r3 r3/2 r3/2 r3/2 0 0 0 -r3/2 -r3/2 -r3/2 -r3 -r3 0 0 ];
axis equal
line(a1,b1); %把座標連接起來
line(a2,b2);
line(a3,b3);
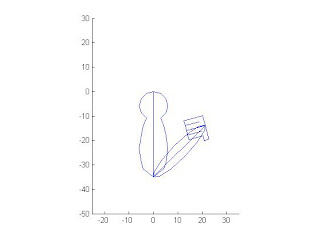
clf
theta1=90;theta2=-45;theta3=-30;
axis equal
AXIS([-25 35 -50 30]);
x1=a1*cosd(-theta1)-b1*sind(-theta1); %以下都是旋轉和平移目的是轉動和連接各部份
y1=a1*sind(-theta1)+b1*cosd(-theta1);
line(x1,y1)
theta2=180+theta1-theta2;
x2=a2*cosd(-theta2)-b2*sind(-theta2)+x1(12);
y2=a2*sind(-theta2)+b2*cosd(-theta2)+y1(12);
line(x2,y2)theta3=180+theta2-theta3;
x3=a3*cosd(-theta3)-b3*sind(-theta3)+x2(7);
y3=a3*sind(-theta3)+b3*cosd(-theta3)+y2(7);
line(x3,y3)
第2小題
function body1(L1,L2,L3,theta1,theta2,theta3)
r1=L1/6;%把手掌分段以利設座標
r2=L2/2;
r3=L3/2;
a1=[0 r1*cosd(150)+r1 r1*cosd(120)+r1 r1 r1*cosd(60)+r1 r1*cosd(30)+r1 2*r1*cosd(45)+r1 2*r1*cosd(60)+2*r1 4*r1 2*r1*cosd(60)+4*r1 2*r1*cosd(45)+4*r1 6*r1 2*r1*cosd(45)+4*r1 2*r1*cosd(60)+4*r1 4*r1 2*r1*cosd(60)+2*r1 2*r1*cosd(45)+r1 r1*cosd(30)+r1 r1*cosd(60)+r1 r1 r1*cosd(240)+r1 r1*cosd(210)+r1 0 L1]; %這是上手臂座標
b1=[0 r1*sind(150) r1*sind(120) r1 r1*sind(60) r1*sind(30) r1*sind(45) r1*sind(60) r1 r1*sind(60) r1*sind(45) 0 -r1*sind(45) -r1*sind(60) -r1 -r1*sind(60) -r1*sind(45) -r1*sind(30) -r1*sind(60) -r1 r1*sind(240) r1*sind(210) 0 0]; %這是上手臂座標
a2=[0 r2+r2*cosd(150) r2+r2*cosd(120) r2+r2*cosd(90) r2+r2*cosd(60) r2+r2*cosd(30) r2+r2*cosd(0) r2+r2*cosd(30) r2+r2*cosd(60) r2+r2*cosd(90) r2+r2*cosd(120) r2+r2*cosd(150) 0 2*r2];
b2=[0 r2/5*sind(150) r2/5*sind(120) r2/5*sind(90) r2/5*sind(60) r2/5*sind(30) r2/5*sind(0) -r2/5*sind(30) -r2/5*sind(60) -r2/5*sind(90) -r2/5*sind(120) -r2/5*sind(150) 0 0 ];
a3=[0 0 r3/2 r3/2 2*r3 2*r3 r3/2 2*r3 2*r3 r3/2 2*r3 2*r3 r3/2 2*r3 2*r3 0 0 2*r3]; %這是手掌座標
b3=[0 r3*1.5 r3*1.5 r3 r3 r3/2 r3/2 r3/2 0 0 0 -r3/2 -r3/2 -r3/2 -r3 -r3 0 0 ]; %這是手掌座標
axis equal
line(a1,b1);%把座標連接起來
line(a2,b2);
line(a3,b3);
clf
axis equal
AXIS([-25 35 -50 30]);
x1=a1*cosd(-theta1)-b1*sind(-theta1); %以下都是旋轉和平移目的是轉動和連接各部份
y1=a1*sind(-theta1)+b1*cosd(-theta1);
line(x1,y1)theta2=180+theta1-theta2;
x2=a2*cosd(-theta2)-b2*sind(-theta2)+x1(12);
y2=a2*sind(-theta2)+b2*cosd(-theta2)+y1(12);
line(x2,y2)theta3=180+theta2-theta3;
x3=a3*cosd(-theta3)-b3*sind(-theta3)+x2(7);
y3=a3*sind(-theta3)+b3*cosd(-theta3)+y2(7);
line(x3,y3)
第3小題
從新開一個檔案然後把function body1(L1,L2,L3,theta1,theta2,theta3)填入所需要的值所以新檔案打上下面的式子即可body1(35,30,8,90,-45,-35)
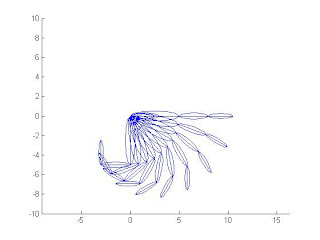
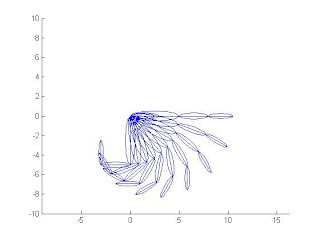
第4小題
L1=35;%這是上手臂長
L2=30;%這是手臂長
L3=8;%這是手掌長
r1=L1/6;%把手掌分段以利設座標
r2=L2/2;
r3=L3/2;
a1=[0 r1*cosd(150)+r1 r1*cosd(120)+r1 r1 r1*cosd(60)+r1 r1*cosd(30)+r1 2*r1*cosd(45)+r1 2*r1*cosd(60)+2*r1 4*r1 2*r1*cosd(60)+4*r1 2*r1*cosd(45)+4*r1 6*r1 2*r1*cosd(45)+4*r1 2*r1*cosd(60)+4*r1 4*r1 2*r1*cosd(60)+2*r1 2*r1*cosd(45)+r1 r1*cosd(30)+r1 r1*cosd(60)+r1 r1 r1*cosd(240)+r1 r1*cosd(210)+r1 0 L1]; %這是上手臂座標
b1=[0 r1*sind(150) r1*sind(120) r1 r1*sind(60) r1*sind(30) r1*sind(45) r1*sind(60) r1 r1*sind(60) r1*sind(45) 0 -r1*sind(45) -r1*sind(60) -r1 -r1*sind(60) -r1*sind(45) -r1*sind(30) -r1*sind(60) -r1 r1*sind(240) r1*sind(210) 0 0]; %這是上手臂座標
a2=[0 r2+r2*cosd(150) r2+r2*cosd(120) r2+r2*cosd(90) r2+r2*cosd(60) r2+r2*cosd(30) r2+r2*cosd(0) r2+r2*cosd(30) r2+r2*cosd(60) r2+r2*cosd(90) r2+r2*cosd(120) r2+r2*cosd(150) 0 2*r2]; %這是手臂座標
b2=[0 r2/5*sind(150) r2/5*sind(120) r2/5*sind(90) r2/5*sind(60) r2/5*sind(30) r2/5*sind(0) -r2/5*sind(30) -r2/5*sind(60) -r2/5*sind(90) -r2/5*sind(120) -r2/5*sind(150) 0 0 ]; %這是手臂座標
a3=[0 0 r3/2 r3/2 2*r3 2*r3 r3/2 2*r3 2*r3 r3/2 2*r3 2*r3 r3/2 2*r3 2*r3 0 0 2*r3]; %這是手掌座標
b3=[0 r3*1.5 r3*1.5 r3 r3 r3/2 r3/2 r3/2 0 0 0 -r3/2 -r3/2 -r3/2 -r3 -r3 0 0 ];%這是手掌座標
axis equal
line(a1,b1); %把座標連接起來
line(a2,b2);
line(a3,b3);
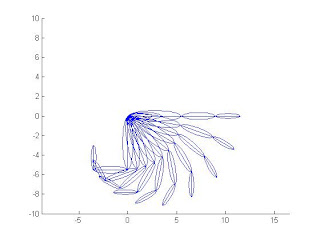
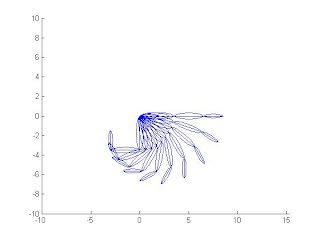
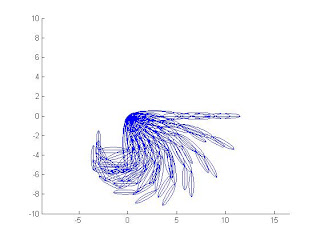
clf
theta1=linspace(-90,-75,10) %-90和-75度之間分十等分
theta2=linspace(-45,-35,10) %-45和-35度之間分十等分
theta3=linspace(-30,-10,10) %-30和-10度之間分十等分
for n=1:25;
axis equal
AXIS([-100 100 -100 100]);
x1=a1*cosd(-theta1(n))-b1*sind(-theta1(n)); %以下都是旋轉和平移目的是轉動和連接各部份
y1=a1*sind(-theta1(n))+b1*cosd(-theta1(n));
line(x1,y1)theta2(n)=180+theta1(n)-theta2(n);
x2=a2*cosd(-theta2(n))-b2*sind(-theta2(n))+x1(12);
y2=a2*sind(-theta2(n))+b2*cosd(-theta2(n))+y1(12);
line(x2,y2)theta3(n)=180+theta2(n)-theta3(n);
x3=a3*cosd(-theta3(n))-b3*sind(-theta3(n))+x2(7);
y3=a3*sind(-theta3(n))+b3*cosd(-theta3(n))+y2(7);
line(x3,y3)
pause(0.05)
clf
end;
http://www.youtube.com/watch?v=_VgMcEDvl7k5.2.1
假設指夾部分是L1,下一截是L2,接手掌部分是L3。L1、L2和L2跟手掌之間只能旋轉90度的旋轉節,L2、L3亦有90度的限制。 套用自由度計算因為有三個節,節之自由度總和為1+1+1=3
5.2.2
食指
function hand1(P,theta1,theta2,theta3)
Ltotal=P %這是輸入你的手掌長
L1=5/18*Ltotal;%這是連接手掌的長度
L2=3/18*Ltotal;%這是中間部分
L3=2.5/18*Ltotal;%這是指夾的長度
r1=L1/2;
r2=L2/2;
r3=L3/2;
a1=[0 r1+r1*cosd(150) r1+r1*cosd(120) r1+r1*cosd(90) r1+r1*cosd(60) r1+r1*cosd(30) r1+r1*cosd(0) r1+r1*cosd(30) r1+r1*cosd(60) r1+r1*cosd(90) r1+r1*cosd(120) r1+r1*cosd(150) 0 2*r1];%這是連接手掌的座標
b1=[0 r1/5*sind(150) r1/5*sind(120) r1/5*sind(90) r1/5*sind(60) r1/5*sind(30) r1/5*sind(0) -r1/5*sind(30) -r1/5*sind(60) -r1/5*sind(90) -r1/5*sind(120) -r1/5*sind(150) 0 0 ];
a2=[0 r2+r2*cosd(150) r2+r2*cosd(120) r2+r2*cosd(90) r2+r2*cosd(60) r2+r2*cosd(30) r2+r2*cosd(0) r2+r2*cosd(30) r2+r2*cosd(60) r2+r2*cosd(90) r2+r2*cosd(120) r2+r2*cosd(150) 0 2*r2];%這是中間部分部份
b2=[0 r2/5*sind(150) r2/5*sind(120) r2/5*sind(90) r2/5*sind(60) r2/5*sind(30) r2/5*sind(0) -r2/5*sind(30) -r2/5*sind(60) -r2/5*sind(90) -r2/5*sind(120) -r2/5*sind(150) 0 0 ];
a3=[0 r3+r3*cosd(150) r3+r3*cosd(120) r3+r3*cosd(90) r3+r3*cosd(60) r3+r3*cosd(30) r3+r3*cosd(0) r3+r3*cosd(30) r3+r3*cosd(60) r3+r3*cosd(90) r3+r3*cosd(120) r3+r3*cosd(150) 0 2*r3];%這是指夾的座標
b3=[0 r3/5*sind(150) r3/5*sind(120) r3/5*sind(90) r3/5*sind(60) r3/5*sind(30) r3/5*sind(0) -r3/5*sind(30) -r3/5*sind(60) -r3/5*sind(90) -r3/5*sind(120) -r3/5*sind(150) 0 0 ];
axis equal
AXIS([-10 10 -10 10])
line(a1,b1);
line(a2,b2);
line(a3,b3);
axis equal
x1=a1*cosd(-theta1)-b1*sind(-theta1);%這是連接各部份手指的部份
y1=a1*sind(-theta1)+b1*cosd(-theta1);
line(x1,y1)theta2=180+theta1-theta2;
x2=a2*cosd(-theta2)-b2*sind(-theta2)+x1(7);
y2=a2*sind(-theta2)+b2*cosd(-theta2)+y1(7);
line(x2,y2)theta3=180+theta2-theta3;
x3=a3*cosd(-theta3)-b3*sind(-theta3)+x2(14);
y3=a3*sind(-theta3)+b3*cosd(-theta3)+y2(14);line(x3,y3)
然後開一個新檔呼叫function
檔案如下
theta1=linspace(0,90,10);
theta2=linspace(180,90,10);
theta3=linspace(180,90,10);
for n=1:10
hand1(18,theta1(n),theta2(n),theta3(n))
pause(0.05)
end
中指
function hand2(P,theta1,theta2,theta3)
Ltotal=P %這是輸入你的手掌長
L1=5/18*Ltotal;%這是連接手掌的長度
L2=3/18*Ltotal;%這是中間部分
L3=2.5/18*Ltotal;%這是指夾的長度
r1=L1/2;
r2=L2/2;
r3=L3/2;
a1=[0 r1+r1*cosd(150) r1+r1*cosd(120) r1+r1*cosd(90) r1+r1*cosd(60) r1+r1*cosd(30) r1+r1*cosd(0) r1+r1*cosd(30) r1+r1*cosd(60) r1+r1*cosd(90) r1+r1*cosd(120) r1+r1*cosd(150) 0 2*r1];%這是連接手掌的座標
b1=[0 r1/5*sind(150) r1/5*sind(120) r1/5*sind(90) r1/5*sind(60) r1/5*sind(30) r1/5*sind(0) -r1/5*sind(30) -r1/5*sind(60) -r1/5*sind(90) -r1/5*sind(120) -r1/5*sind(150) 0 0 ];
a2=[0 r2+r2*cosd(150) r2+r2*cosd(120) r2+r2*cosd(90) r2+r2*cosd(60) r2+r2*cosd(30) r2+r2*cosd(0) r2+r2*cosd(30) r2+r2*cosd(60) r2+r2*cosd(90) r2+r2*cosd(120) r2+r2*cosd(150) 0 2*r2];%這是中間部分部份
b2=[0 r2/5*sind(150) r2/5*sind(120) r2/5*sind(90) r2/5*sind(60) r2/5*sind(30) r2/5*sind(0) -r2/5*sind(30) -r2/5*sind(60) -r2/5*sind(90) -r2/5*sind(120) -r2/5*sind(150) 0 0 ];a3=[0 r3+r3*cosd(150) r3+r3*cosd(120) r3+r3*cosd(90) r3+r3*cosd(60) r3+r3*cosd(30) r3+r3*cosd(0) r3+r3*cosd(30) r3+r3*cosd(60) r3+r3*cosd(90) r3+r3*cosd(120) r3+r3*cosd(150) 0 2*r3];%這是指夾的座標
b3=[0 r3/5*sind(150) r3/5*sind(120) r3/5*sind(90) r3/5*sind(60) r3/5*sind(30) r3/5*sind(0) -r3/5*sind(30) -r3/5*sind(60) -r3/5*sind(90) -r3/5*sind(120) -r3/5*sind(150) 0 0 ];
axis equal
AXIS([-10 10 -10 10])
line(a1,b1);
line(a2,b2);
line(a3,b3);
axis equal
x1=a1*cosd(-theta1)-b1*sind(-theta1);%這是連接各部份手指的部份
y1=a1*sind(-theta1)+b1*cosd(-theta1);
line(x1,y1)theta2=180+theta1-theta2;
x2=a2*cosd(-theta2)-b2*sind(-theta2)+x1(7);
y2=a2*sind(-theta2)+b2*cosd(-theta2)+y1(7);
line(x2,y2)theta3=180+theta2-theta3;
x3=a3*cosd(-theta3)-b3*sind(-theta3)+x2(14);
y3=a3*sind(-theta3)+b3*cosd(-theta3)+y2(14);
line(x3,y3)
然後開一個新檔呼叫function
檔案如下
theta1=linspace(0,90,10);
theta2=linspace(180,90,10);
theta3=linspace(180,90,10);
for n=1:10
hand2(18,theta1(n),theta2(n),theta3(n))
pause(0.05)
end
無名指
function hand3(P,theta1,theta2,theta3)
Ltotal=P %這是輸入你的手掌長
L1=5/18*Ltotal;%這是連接手掌的長度
L2=3/18*Ltotal;%這是中間部分
L3=2.5/18*Ltotal;%這是指夾的長度
r1=L1/2;
r2=L2/2;
r3=L3/2;
a1=[0 r1+r1*cosd(150) r1+r1*cosd(120) r1+r1*cosd(90) r1+r1*cosd(60) r1+r1*cosd(30) r1+r1*cosd(0) r1+r1*cosd(30) r1+r1*cosd(60) r1+r1*cosd(90) r1+r1*cosd(120) r1+r1*cosd(150) 0 2*r1];%這是連接手掌的座標
b1=[0 r1/5*sind(150) r1/5*sind(120) r1/5*sind(90) r1/5*sind(60) r1/5*sind(30) r1/5*sind(0) -r1/5*sind(30) -r1/5*sind(60) -r1/5*sind(90) -r1/5*sind(120) -r1/5*sind(150) 0 0 ];
a2=[0 r2+r2*cosd(150) r2+r2*cosd(120) r2+r2*cosd(90) r2+r2*cosd(60) r2+r2*cosd(30) r2+r2*cosd(0) r2+r2*cosd(30) r2+r2*cosd(60) r2+r2*cosd(90) r2+r2*cosd(120) r2+r2*cosd(150) 0 2*r2];%這是中間部分部份
b2=[0 r2/5*sind(150) r2/5*sind(120) r2/5*sind(90) r2/5*sind(60) r2/5*sind(30) r2/5*sind(0) -r2/5*sind(30) -r2/5*sind(60) -r2/5*sind(90) -r2/5*sind(120) -r2/5*sind(150) 0 0 ];
a3=[0 r3+r3*cosd(150) r3+r3*cosd(120) r3+r3*cosd(90) r3+r3*cosd(60) r3+r3*cosd(30) r3+r3*cosd(0) r3+r3*cosd(30) r3+r3*cosd(60) r3+r3*cosd(90) r3+r3*cosd(120) r3+r3*cosd(150) 0 2*r3];%這是指夾的座標
b3=[0 r3/5*sind(150) r3/5*sind(120) r3/5*sind(90) r3/5*sind(60) r3/5*sind(30) r3/5*sind(0) -r3/5*sind(30) -r3/5*sind(60) -r3/5*sind(90) -r3/5*sind(120) -r3/5*sind(150) 0 0 ];
axis equal
AXIS([-10 10 -10 10])
line(a1,b1);
line(a2,b2);
line(a3,b3);
axis equal
x1=a1*cosd(-theta1)-b1*sind(-theta1);%這是連接各部份手指的部份
y1=a1*sind(-theta1)+b1*cosd(-theta1);
line(x1,y1)
theta2=180+theta1-theta2;
x2=a2*cosd(-theta2)-b2*sind(-theta2)+x1(7);
y2=a2*sind(-theta2)+b2*cosd(-theta2)+y1(7);
line(x2,y2)
theta3=180+theta2-theta3;
x3=a3*cosd(-theta3)-b3*sind(-theta3)+x2(14);
y3=a3*sind(-theta3)+b3*cosd(-theta3)+y2(14);
line(x3,y3)(-theta3)+y2(14);
line(x3,y3)
然後開一個新檔呼叫function
檔案如下
theta1=linspace(0,90,10);
theta2=linspace(180,90,10);
theta3=linspace(180,90,10);
for n=1:10
hand1(18,theta1(n),theta2(n),theta3(n))
pause(0.05)
end
小拇指
function hand4(P,theta1,theta2,theta3)
Ltotal=P %這是輸入你的手掌長
L1=5/18*Ltotal;%這是連接手掌的長度
L2=3/18*Ltotal;%這是中間部分
L3=2.5/18*Ltotal;%這是指夾的長度
r1=L1/2;
r2=L2/2;
r3=L3/2;
a1=[0 r1+r1*cosd(150) r1+r1*cosd(120) r1+r1*cosd(90) r1+r1*cosd(60) r1+r1*cosd(30) r1+r1*cosd(0) r1+r1*cosd(30) r1+r1*cosd(60) r1+r1*cosd(90) r1+r1*cosd(120) r1+r1*cosd(150) 0 2*r1];%這是連接手掌的座標
b1=[0 r1/5*sind(150) r1/5*sind(120) r1/5*sind(90) r1/5*sind(60) r1/5*sind(30) r1/5*sind(0) -r1/5*sind(30) -r1/5*sind(60) -r1/5*sind(90) -r1/5*sind(120) -r1/5*sind(150) 0 0 ];
a2=[0 r2+r2*cosd(150) r2+r2*cosd(120) r2+r2*cosd(90) r2+r2*cosd(60) r2+r2*cosd(30) r2+r2*cosd(0) r2+r2*cosd(30) r2+r2*cosd(60) r2+r2*cosd(90) r2+r2*cosd(120) r2+r2*cosd(150) 0 2*r2];%這是中間部分部份
b2=[0 r2/5*sind(150) r2/5*sind(120) r2/5*sind(90) r2/5*sind(60) r2/5*sind(30) r2/5*sind(0) -r2/5*sind(30) -r2/5*sind(60) -r2/5*sind(90) -r2/5*sind(120) -r2/5*sind(150) 0 0 ];
a3=[0 r3+r3*cosd(150) r3+r3*cosd(120) r3+r3*cosd(90) r3+r3*cosd(60) r3+r3*cosd(30) r3+r3*cosd(0) r3+r3*cosd(30) r3+r3*cosd(60) r3+r3*cosd(90) r3+r3*cosd(120) r3+r3*cosd(150) 0 2*r3];%這是指夾的座標
b3=[0 r3/5*sind(150) r3/5*sind(120) r3/5*sind(90) r3/5*sind(60) r3/5*sind(30) r3/5*sind(0) -r3/5*sind(30) -r3/5*sind(60) -r3/5*sind(90) -r3/5*sind(120) -r3/5*sind(150) 0 0 ];
axis equal
AXIS([-10 10 -10 10])
line(a1,b1);
line(a2,b2);
line(a3,b3);
axis equal
x1=a1*cosd(-theta1)-b1*sind(-theta1);%這是連接各部份手指的部份
y1=a1*sind(-theta1)+b1*cosd(-theta1);
line(x1,y1)
theta2=180+theta1-theta2;
x2=a2*cosd(-theta2)-b2*sind(-theta2)+x1(7);
y2=a2*sind(-theta2)+b2*cosd(-theta2)+y1(7);
line(x2,y2)
theta3=180+theta2-theta3;
x3=a3*cosd(-theta3)-b3*sind(-theta3)+x2(14);
y3=a3*sind(-theta3)+b3*cosd(-theta3)+y2(14);
line(x3,y3)
然後開一個新檔呼叫function
檔案如下
theta1=linspace(0,90,10);
theta2=linspace(180,90,10);
theta3=linspace(180,90,10);
for n=1:10
hand1(18,theta1(n),theta2(n),theta3(n))
pause(0.05)
end
然後開一個新檔呼叫function
檔案如下
theta1=linspace(0,90,10);
theta2=linspace(180,90,10);
theta3=linspace(180,90,10);
for n=1:10
hand1(18,theta1(n),theta2(n),theta3(n))
pause(0.05)
end
for n=1:10
hand2(18,theta1(n),theta2(n),theta3(n))
pause(0.05)
end
for n=1:10
hand3(18,theta1(n),theta2(n),theta3(n))
pause(0.05)
end
for n=1:10
hand4(18,theta1(n),theta2(n),theta3(n))
pause(0.05)
end
5.2.3假設球投出的瞬間,手掌和接手掌指節的角速度是和角加速度是W和a
然後指節長度是R
所以切線加速度就是aR
而法線加速度就是w*w*R





















































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}